
CNR 2015: Lectures: Stephane Bonardi (FRA): Modular robots for smart environments
He is now a postdoctoral research fellow at the Biorobotics Laboratory (Biorob) at EPFL. He is working on the Roombots project, on the aspects of self-reconfiguration, locomotion learning, and end-user interface.
Abstract
The world of robotics has evolved dramatically over the last
decade. Robots have seen their capabilities increasing, both in
terms of mechanics and electronics but also in terms of control. A
growing number of robots are no more limited to lab spaces and are
being designed to be integrated in every day life environments.
They should provide services, help, and support to a wide variety
of end-users, ranging from young children to elderly, all of them
having specific needs. In every day life environments, robots also
appear in many shapes and orders of complexity, from the very
advanced humanoid robots, such as Asimo from Honda, able to walk,
run, and manipulate objects, to the simpler vacuum cleaner robot
Roomba from iRobot, limited to a specific task. But the complexity
of these robots is often linked to their cost, which confines the
most advanced ones to lab's environments. They are also often
specialized into carrying out a specific set of tasks, such as
manipulating objects or exploring unknown environments. These
robots suffer from their high level of specialization into a
specific domain and are lacking the ability to adapt to the task to
be performed.
As opposed to this rise in complexity trend, the domain of reconfigurable modular robots has emerged as a potential solution. Reconfigurable modular robots are simple interchangeable units able to assemble to form a more complex structure to solve various more complicated tasks. Among them, Self-Reconfigurable Modular Robots (SRMRs) are equipped with active connection mechanisms allowing them to dynamically and autonomously change shape to adapt to the user needs or to the task to be performed (in a process called Self-Reconfiguration). In addition to the study of Self-Reconfiguration, modular robots, thanks to their connection mechanisms, can be used as a fast prototyping tool to create a large variety of shape to study locomotion learning.
SRMRs have been created to bring flexibility and adaptability to the world of robotics by dramatically changing the paradigms in place so far for solving a task or react to an unknown environment. With the ever growing interest in smart buildings and the prospective ideas of highly customizable and reconfigurable environments, new opportunities to exploit the advantages of SRMR are arising. This talk will present recent achievements in modular robotics and describe potential applications of modular robots to various domains, focusing on the topic of smart environments.
Link:
Stéphane Bonardi
[image source: Biorobotics Laboratory, EPFL]
[source: Vive Les Robots!]
Cafe Neu Romance
2015:
Program
Exhibition
Lectures
Live
Workshops
Competitions

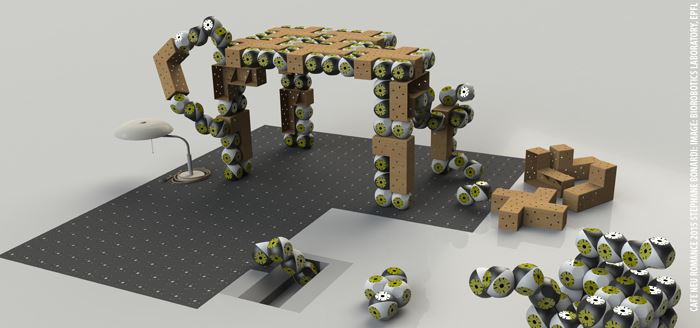
Rendered picture representing the different aspects of the Roombots project, conducted at the Biorobotics laboratory (EPFL, Switzerland).
On this illustration, a table is being constructed out of active modules and passives elements (wooden color) evolving on a 2D grid (in dark grey).
A set of modules is located out of the grid and metamodules separate from the main group to perform off-grid locomotion. They reattached to the grid using a sink mechanism included in the ground.
Modular robots for
smart environments
Stéphane Bonardi will present his lecture "Modular
robots for smart environments" at Cafe Neu Romance on
the 28 November 2015 at NTK.
Galerie NTK
Technická 6
16080 Prague.