

CNR 2013: Exhibition: Olga Kalugina (RUS)
Olga was awarded in many competitions including Russian Design (2008), International Design Award (2009), international competition of young designers KREATA, Design and Design International Award (2011), Be Open Award (2012) and others.
She currently lives and works in Moscow, Russia.
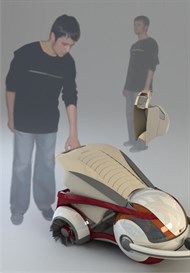
Robot-harvester for pedestrian areas
SCARAB
Robot is created for gathering rubbish from street territories of
shopping centers.
Robot moves using two front wheels, each of them has individual drive gear. Robot can gather big rubbish using manipulators with two extents of freedom. Manipulators are on the base that can move for 23 degrees, that makes the manipulator's zone of scope wider.
Two web cameras and sensing length element help to make estimate of the territory and find where the rubbish is. Scope of small rubbish creates by two diagonal sweeper-collectors, that sweep just close to the edge.
After sweeping rubbish goes to tank. The tank is divided for two parts: for small and big rubbish. Big rubbish is put by manipulators and falls through upper hole, that is closed with plates. The plates work using the principle of jalousie from small serve drive. All the rubbish is put away from robot automatically. Rubbish tank can be put away for washing. Recharging of accumulators is automatic too.
[image source: Olga Kalugina]
[source: Vive Les Robots!]
Cafe Neu Romance 2013:
Program
Exhibition
Lectures
Films
& AV
Seminars
Workshops
Events
Olga Kalugina is an award-winning industrial designer from Yekaterinburg, Russia.
SCARAB
The robot-harvester concept by industrial designer Olga Kalugina
will be shown during Cafe Neu Romance (27-30 November 2013) at
Galerie NTK.
Galerie NTK
Technická 6
16080 Prague.